HELICS Fundamentals#
Overview#
This lesson introduces the core concepts of HELICS (Hierarchical Engine for Large-scale Infrastructure Co-Simulation), building directly on the installation completed in the previous lesson. We will progress from fundamental concepts to hands-on implementation of simple co-simulation federates.
Learning Objectives#
By the end of this lesson, students will be able to:
Explain the purpose and architecture of HELICS co-simulation
Understand the roles of brokers, federates, and the publication/subscription model
Identify the stages of co-simulation execution
Create and run simple two-federate co-simulations in Python
Configure federate communication using both API calls and JSON configuration
Debug basic co-simulation issues
Prerequisites#
Completed Lesson 1 (Co-Simulation Environment Setup)
Active
cosimconda environment with HELICS installedBasic Python programming knowledge
Understanding of simulation concepts
Environment Verification#
Before we begin, let’s verify that our co-simulation environment is properly configured and HELICS is available.
# Verify HELICS installation and basic functionality
import sys
import os
import time
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
try:
import helics as h
print(f"✓ HELICS version: {h.helicsGetVersion()}")
print(f"✓ Python version: {sys.version.split()[0]}")
print(f"✓ Environment ready for co-simulation")
except ImportError as e:
print(f"✗ HELICS import failed: {e}")
print("Please ensure the 'cosim' conda environment is activated")
print("Run: mamba activate cosim")
except OSError as e:
if "undefined symbol" in str(e):
print(f"✗ HELICS import failed with C++ library error: {e}")
print("\nThis is a known issue with Jupyter environments.")
print("Please see the troubleshooting section in setup.md:")
print(" Section: 'HELICS Import Error in Jupyter'")
print("\nQuick fix: Use the custom kernel 'CoSim (HELICS Fixed)' if available")
else:
raise
✓ HELICS version: 3.6.1 (2025-02-24)
✓ Python version: 3.9.23
✓ Environment ready for co-simulation
Introduction: Why Co-Simulation?#
The Challenge of Complex Systems#
Modern engineering systems are increasingly complex and interconnected. Consider these examples:
Smart Grids: Electrical transmission systems interact with distribution networks, which connect to renewable energy sources, electric vehicles, and smart appliances
Smart Cities: Transportation systems coordinate with energy networks, communication infrastructure, and building management systems
Industrial Systems: Manufacturing processes integrate with supply chains, energy systems, and control networks
Limitations of Traditional Simulation#
Traditional simulation approaches face several limitations:
Domain Expertise: Different parts of complex systems require specialized modeling tools and domain knowledge
Computational Complexity: Modeling everything in one tool becomes computationally intractable
Tool Optimization: Specialized tools are optimized for specific domains and may not handle other domains well
Development Cost: Creating monolithic simulation tools for complex systems is expensive and time-consuming
Co-Simulation Solution#
Co-simulation addresses these challenges by:
Connecting Specialized Tools: Each tool focuses on what it does best
Coordinated Execution: Tools run simultaneously and exchange information
Time Synchronization: Ensures all tools advance through time in a coordinated manner
Scalable Architecture: Can accommodate from two to thousands of simulation tools
Core HELICS Concepts#
The HELICS Architecture#
HELICS provides a standardized framework for co-simulation with four key components:
1. Broker#
Definition: Central coordination hub that manages communication between federates
Functionality: Message routing, time synchronization, federation lifecycle management
Analogy: Like a postal service that coordinates mail delivery between different addresses
Implementation: Usually one broker per co-simulation, but can be hierarchical for large systems
2. Federate#
Definition: An individual simulation or computational entity within the co-simulation
Types:
Value federates (continuous/physics-based simulations)
Message federates (discrete event simulations)
Combination federates (both value and message capabilities)
Characteristics: Independent execution, specific time management, defined interfaces
3. Publication/Subscription Model#
Concept: Decoupled communication where data producers and consumers don’t directly interact
Publications: Data outputs from a federate that other federates can access
Subscriptions: Data inputs to a federate from other federates’ publications
Benefits: Scalability, modularity, flexibility in system design
4. Time Management#
Purpose: Ensures all federates advance through simulation time in a coordinated manner
Implementation: Federates request permission to advance to specific times
Coordination: Broker grants time advancement only when it’s safe for all federates
Co-Simulation Execution Stages#
Every HELICS co-simulation progresses through four distinct stages:
Creation: Register federates, define publications/subscriptions, establish communication interfaces
Initialization: Prepare for simulation, exchange initial data, verify connections
Execution: Main simulation loop with coordinated time advancement and data exchange
Finalization: Clean shutdown, disconnect federates, release resources
First HELICS Program: Pi Exchange#
We’ll start with a simple example that demonstrates the core HELICS concepts: a federate that calculates pi using a Monte Carlo method and another federate that receives and displays the results.
System Design#
Pi Calculator Federate:
Computes pi using Monte Carlo method (random points in circle vs square)
Publishes pi estimates at regular intervals
Improves accuracy over time by increasing sample size
Pi Receiver Federate:
Subscribes to pi estimates from the calculator
Displays received values and compares to true value
Tracks improvement in accuracy over time
Implementation Strategy#
We’ll implement both federates in the same notebook using Python threading to run them simultaneously.
# Import required libraries for the Pi exchange example
import threading
import time
import random
import math
from queue import Queue
# Verify threading capability
print("✓ Threading support available")
print("✓ Ready to implement Pi exchange example")
✓ Threading support available
✓ Ready to implement Pi exchange example
Pi Calculator Federate Implementation#
def pi_calculator_federate():
"""
HELICS federate that calculates pi using Monte Carlo method
and publishes results for other federates to consume
"""
print("[Pi Calculator] Starting federate...")
# Step 1: Create federate info object
fedinfo = h.helicsCreateFederateInfo()
# Step 2: Configure federate properties
h.helicsFederateInfoSetCoreName(fedinfo, "PiCalculator")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
h.helicsFederateInfoSetCoreInitString(fedinfo, "--federates=1")
h.helicsFederateInfoSetTimeProperty(fedinfo, h.helics_property_time_delta, 0.01)
# Step 3: Create the federate
fed = h.helicsCreateValueFederate("PiCalculator", fedinfo)
print("[Pi Calculator] ✓ Value federate created")
# Step 4: Register publication
pub = h.helicsFederateRegisterGlobalPublication(fed, "pi_estimate", h.HELICS_DATA_TYPE_DOUBLE, "")
print("[Pi Calculator] ✓ Publication 'pi_estimate' registered")
# Step 5: Enter execution mode
print("[Pi Calculator] Entering execution mode...")
h.helicsFederateEnterExecutingMode(fed)
print("[Pi Calculator] ✓ Execution mode entered")
# Step 6: Main simulation loop
current_time = 0.0
time_step = 1.0 # 1 second steps
total_samples = 1000
for step in range(10): # Run for 10 time steps
# Request permission to advance to next time
next_time = (step + 1) * time_step
current_time = h.helicsFederateRequestTime(fed, next_time)
# Monte Carlo calculation of pi
samples_in_circle = 0
for _ in range(total_samples):
x = random.uniform(-1, 1)
y = random.uniform(-1, 1)
if x*x + y*y <= 1:
samples_in_circle += 1
# Calculate pi estimate
pi_estimate = 4 * samples_in_circle / total_samples
error = abs(pi_estimate - math.pi)
# Publish the result
h.helicsPublicationPublishDouble(pub, pi_estimate)
print(f"[Pi Calculator] Time {current_time:.1f}s: π ≈ {pi_estimate:.6f} (error: {error:.6f})")
# Increase sample size for better accuracy
total_samples += 500
# Step 7: Finalize federate
h.helicsFederateDestroy(fed)
print("[Pi Calculator] ✓ Federate finalized")
Pi Receiver Federate Implementation#
def pi_receiver_federate(results_queue):
"""
HELICS federate that receives pi estimates from calculator
and analyzes the accuracy improvement over time
"""
print("[Pi Receiver] Starting federate...")
# Step 1: Create federate info object
fedinfo = h.helicsCreateFederateInfo()
# Step 2: Configure federate properties
h.helicsFederateInfoSetCoreName(fedinfo, "PiReceiver")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
h.helicsFederateInfoSetCoreInitString(fedinfo, "--federates=1")
h.helicsFederateInfoSetTimeProperty(fedinfo, h.helics_property_time_delta, 0.01)
# Step 3: Create the federate
fed = h.helicsCreateValueFederate("PiReceiver", fedinfo)
print("[Pi Receiver] ✓ Value federate created")
# Step 4: Register subscription
sub = h.helicsFederateRegisterSubscription(fed, "pi_estimate", "")
print("[Pi Receiver] ✓ Subscription 'pi_estimate' registered")
# Step 5: Enter execution mode
print("[Pi Receiver] Entering execution mode...")
h.helicsFederateEnterExecutingMode(fed)
print("[Pi Receiver] ✓ Execution mode entered")
# Step 6: Main simulation loop
current_time = 0.0
time_step = 1.0 # 1 second steps
received_values = []
for step in range(10): # Run for 10 time steps
# Request permission to advance to next time
next_time = (step + 1) * time_step
current_time = h.helicsFederateRequestTime(fed, next_time)
# Check if new data is available
if h.helicsInputIsUpdated(sub):
# Receive the pi estimate
pi_received = h.helicsInputGetDouble(sub)
error = abs(pi_received - math.pi)
received_values.append((current_time, pi_received, error))
print(f"[Pi Receiver] Time {current_time:.1f}s: Received π = {pi_received:.6f} (error: {error:.6f})")
else:
print(f"[Pi Receiver] Time {current_time:.1f}s: No new data available")
# Store results for analysis
results_queue.put(received_values)
# Step 7: Finalize federate
h.helicsFederateDestroy(fed)
print("[Pi Receiver] ✓ Federate finalized")
Results Analysis Function#
def analyze_pi_results(received_values):
"""
Analyze and visualize the pi estimation results
"""
if not received_values:
print("No results to analyze")
return
print("\n=== Results Analysis ===")
# Extract data for plotting
times = [item[0] for item in received_values]
pi_estimates = [item[1] for item in received_values]
errors = [item[2] for item in received_values]
# Statistical analysis
initial_error = errors[0] if errors else 0
final_error = errors[-1] if errors else 0
avg_error = sum(errors) / len(errors) if errors else 0
improvement = ((initial_error - final_error) / initial_error * 100) if initial_error > 0 else 0
print(f"Initial error: {initial_error:.6f}")
print(f"Final error: {final_error:.6f}")
print(f"Average error: {avg_error:.6f}")
print(f"Improvement: {improvement:.1f}%")
# Create visualization
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(10, 8))
# Plot pi estimates over time
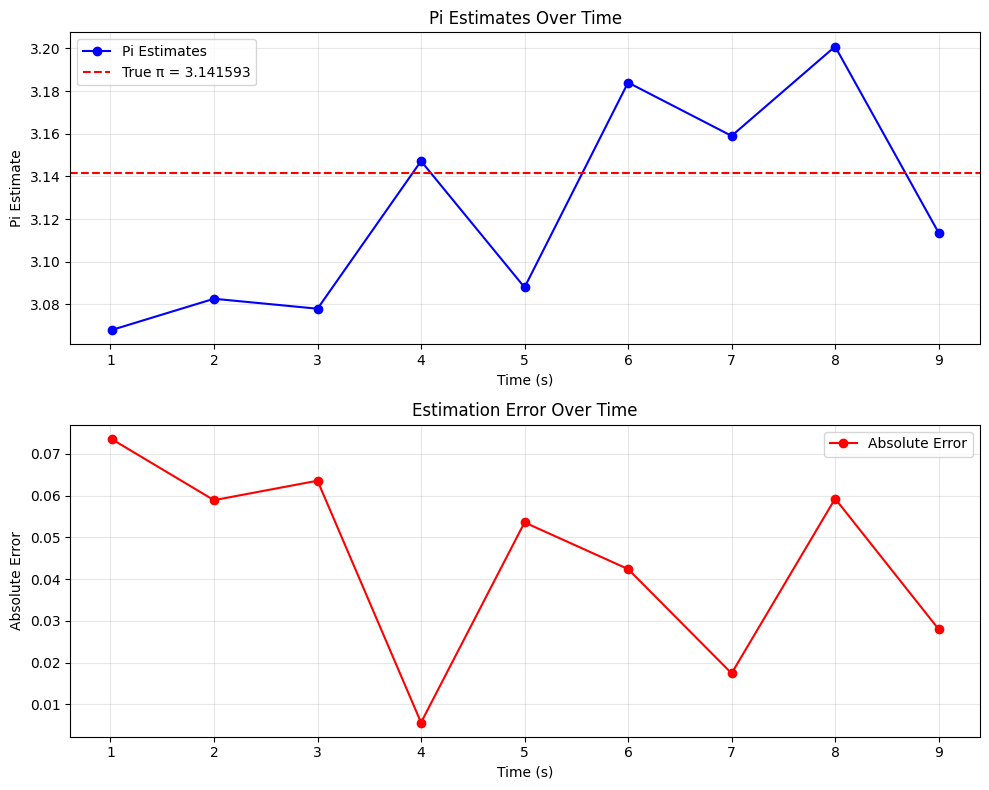
ax1.plot(times, pi_estimates, 'bo-', label='Pi Estimates')
ax1.axhline(y=math.pi, color='r', linestyle='--', label=f'True π = {math.pi:.6f}')
ax1.set_xlabel('Time (s)')
ax1.set_ylabel('Pi Estimate')
ax1.set_title('Pi Estimates Over Time')
ax1.legend()
ax1.grid(True, alpha=0.3)
# Plot error over time
ax2.plot(times, errors, 'ro-', label='Absolute Error')
ax2.set_xlabel('Time (s)')
ax2.set_ylabel('Absolute Error')
ax2.set_title('Estimation Error Over Time')
ax2.legend()
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig('pi_cosimulation_results.png', dpi=300, bbox_inches='tight')
plt.show()
print("\n✓ Results analysis complete")
print("Graph saved as 'pi_cosimulation_results.png'")
Running the Pi Exchange Co-Simulation#
Now we’ll run both federates simultaneously using threading. First, we need to create a broker to coordinate the communication.
def run_pi_exchange_cosimulation():
"""
Run the complete Pi exchange co-simulation with broker and federates
"""
print("=== Starting Pi Exchange Co-Simulation ===")
# Step 1: Create and start broker
print("Creating HELICS broker...")
broker = h.helicsCreateBroker("zmq", "", "-f 2 --name=mainbroker")
# Verify broker is connected
if h.helicsBrokerIsConnected(broker):
print("✓ Broker created and connected successfully")
else:
print("✗ Broker connection failed")
return
# Step 2: Create queue for results
results_queue = Queue()
# Step 3: Create and start federate threads
print("\nStarting federates...")
# Start calculator federate thread
calc_thread = threading.Thread(target=pi_calculator_federate)
calc_thread.start()
# Small delay to ensure calculator starts first
time.sleep(0.5)
# Start receiver federate thread
recv_thread = threading.Thread(target=pi_receiver_federate, args=(results_queue,))
recv_thread.start()
# Step 4: Wait for federates to complete
print("\nWaiting for federates to complete...")
calc_thread.join(timeout=30) # 30 second timeout
recv_thread.join(timeout=30)
# Step 5: Clean up broker
h.helicsBrokerDestroy(broker)
print("\n✓ Broker destroyed")
# Step 6: Analyze results
if not results_queue.empty():
received_values = results_queue.get()
analyze_pi_results(received_values)
print("\n=== Co-Simulation Complete ===")
# Run the co-simulation
run_pi_exchange_cosimulation()
=== Starting Pi Exchange Co-Simulation ===
Creating HELICS broker...
✓ Broker created and connected successfully
Starting federates...
[Pi Calculator] Starting federate...
[Pi Calculator] ✓ Value federate created
[Pi Calculator] ✓ Publication 'pi_estimate' registered
[Pi Calculator] Entering execution mode...
[Pi Receiver] Starting federate...
Waiting for federates to complete...
[Pi Receiver] ✓ Value federate created
[Pi Receiver] ✓ Subscription 'pi_estimate' registered
[Pi Receiver] Entering execution mode...
[Pi Calculator] ✓ Execution mode entered
[Pi Receiver] ✓ Execution mode entered
[Pi Calculator] Time 1.0s: π ≈ 3.068000 (error: 0.073593)
[Pi Receiver] Time 1.0s: No new data available
[Pi Calculator] Time 2.0s: π ≈ 3.082667 (error: 0.058926)
[Pi Receiver] Time 1.0s: Received π = 3.068000 (error: 0.073593)
[Pi Calculator] Time 3.0s: π ≈ 3.078000 (error: 0.063593)
[Pi Receiver] Time 2.0s: Received π = 3.082667 (error: 0.058926)
[Pi Calculator] Time 4.0s: π ≈ 3.147200 (error: 0.005607)
[Pi Receiver] Time 3.0s: Received π = 3.078000 (error: 0.063593)
[Pi Calculator] Time 5.0s: π ≈ 3.088000 (error: 0.053593)
[Pi Receiver] Time 4.0s: Received π = 3.147200 (error: 0.005607)
[Pi Calculator] Time 6.0s: π ≈ 3.184000 (error: 0.042407)
[Pi Receiver] Time 5.0s: Received π = 3.088000 (error: 0.053593)
[Pi Receiver] Time 6.0s: Received π = 3.184000 (error: 0.042407)
[Pi Calculator] Time 7.0s: π ≈ 3.159000 (error: 0.017407)
[Pi Calculator] Time 8.0s: π ≈ 3.200889 (error: 0.059296)
[Pi Receiver] Time 7.0s: Received π = 3.159000 (error: 0.017407)
[Pi Calculator] Time 9.0s: π ≈ 3.113600 (error: 0.027993)
[Pi Receiver] Time 8.0s: Received π = 3.200889 (error: 0.059296)
[Pi Calculator] Time 10.0s: π ≈ 3.155636 (error: 0.014044)
[Pi Receiver] Time 9.0s: Received π = 3.113600 (error: 0.027993)
[Pi Receiver] ✓ Federate finalized
[Pi Calculator] ✓ Federate finalized
✓ Broker destroyed
=== Results Analysis ===
Initial error: 0.073593
Final error: 0.027993
Average error: 0.044713
Improvement: 62.0%
✓ Results analysis complete
Graph saved as 'pi_cosimulation_results.png'
=== Co-Simulation Complete ===
Enhanced Example: Temperature Control System#
Now we’ll implement a more realistic example that demonstrates bidirectional communication: a temperature control system with a controller and a plant model.
System Design#
Controller Federate:
Implements a simple PID-style temperature controller
Subscribes to temperature measurements from the plant
Publishes control signals (heating/cooling commands)
Maintains setpoint temperature
Plant Federate:
Models a simple thermal system with first-order dynamics
Subscribes to control signals from the controller
Publishes current temperature measurements
Includes thermal disturbances and realistic dynamics
class SimpleController:
"""
Simple proportional controller for temperature regulation
"""
def __init__(self, setpoint=25.0, kp=2.0):
self.setpoint = setpoint # Desired temperature (°C)
self.kp = kp # Proportional gain
self.last_error = 0.0
def calculate_control_signal(self, measured_temperature):
"""
Calculate control signal based on temperature error
"""
error = self.setpoint - measured_temperature
control_signal = self.kp * error
# Limit control signal to realistic range (-100 to +100 watts)
control_signal = max(-100, min(100, control_signal))
return control_signal
class SimplePlant:
"""
Simple thermal plant model with first-order dynamics
"""
def __init__(self, initial_temp=20.0, time_constant=10.0, ambient_temp=18.0):
self.temperature = initial_temp # Current temperature (°C)
self.time_constant = time_constant # Thermal time constant (seconds)
self.ambient_temp = ambient_temp # Ambient temperature (°C)
self.thermal_mass = 1.0 # Simplified thermal mass
def update_temperature(self, control_signal, dt=1.0):
"""
Update temperature based on control signal and thermal dynamics
"""
# Heat loss to ambient
heat_loss = (self.temperature - self.ambient_temp) / self.time_constant
# Heat input from control system (watts to temperature change)
heat_input = control_signal * 0.1 # Simplified heat transfer coefficient
# Temperature change using simple Euler integration
temp_change = (heat_input - heat_loss) * dt
self.temperature += temp_change
return self.temperature
print("✓ Controller and Plant classes defined")
✓ Controller and Plant classes defined
Controller Federate Implementation#
def temperature_controller_federate(results_queue):
"""
HELICS federate implementing temperature controller
"""
print("[Controller] Starting temperature controller federate...")
# Create controller instance
controller = SimpleController(setpoint=25.0, kp=2.0)
# Create federate
fedinfo = h.helicsCreateFederateInfo()
h.helicsFederateInfoSetCoreName(fedinfo, "TemperatureController")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
h.helicsFederateInfoSetCoreInitString(fedinfo, "--federates=1")
h.helicsFederateInfoSetTimeProperty(fedinfo, h.helics_property_time_delta, 0.01)
fed = h.helicsCreateValueFederate("TemperatureController", fedinfo)
print("[Controller] ✓ Federate created")
# Register publication (control signal output)
control_pub = h.helicsFederateRegisterGlobalPublication(fed, "control_signal", h.HELICS_DATA_TYPE_DOUBLE, "")
# Register subscription (temperature measurement input)
temp_sub = h.helicsFederateRegisterSubscription(fed, "temperature_measurement", "")
print("[Controller] ✓ Publications and subscriptions registered")
# Enter execution mode
h.helicsFederateEnterExecutingMode(fed)
print("[Controller] ✓ Entering execution mode")
# Main control loop
simulation_data = []
current_time = 0.0
time_step = 1.0
for step in range(30): # Run for 30 seconds
# Request next time step
next_time = (step + 1) * time_step
current_time = h.helicsFederateRequestTime(fed, next_time)
# Get temperature measurement
measured_temp = 20.0 # Default initial temperature
if h.helicsInputIsUpdated(temp_sub):
measured_temp = h.helicsInputGetDouble(temp_sub)
# Calculate control signal
control_signal = controller.calculate_control_signal(measured_temp)
# Publish control signal
h.helicsPublicationPublishDouble(control_pub, control_signal)
# Log data
error = controller.setpoint - measured_temp
simulation_data.append({
'time': current_time,
'temperature': measured_temp,
'setpoint': controller.setpoint,
'control_signal': control_signal,
'error': error
})
print(f"[Controller] Time {current_time:2.0f}s: T={measured_temp:5.1f}°C, SP={controller.setpoint:.1f}°C, U={control_signal:6.1f}W, E={error:5.1f}°C")
# Store results
results_queue.put(('controller', simulation_data))
# Finalize
h.helicsFederateDestroy(fed)
print("[Controller] ✓ Federate finalized")
Plant Federate Implementation#
def analyze_temperature_control_results(results_queue):
"""
Analyze and visualize temperature control results
"""
# Collect results from both federates
controller_data = None
plant_data = None
while not results_queue.empty():
federate_type, data = results_queue.get()
if federate_type == 'controller':
controller_data = data
elif federate_type == 'plant':
plant_data = data
if not controller_data or not plant_data:
print("Insufficient data for analysis")
return
print("\n=== Temperature Control Analysis ===")
# Extract time series data
times = [item['time'] for item in controller_data]
temperatures = [item['temperature'] for item in controller_data]
setpoints = [item['setpoint'] for item in controller_data]
control_signals = [item['control_signal'] for item in controller_data]
errors = [item['error'] for item in controller_data]
# Performance metrics
settling_time = None
steady_state_error = abs(errors[-1])
max_overshoot = max([temp - setpoint for temp, setpoint in zip(temperatures, setpoints)])
# Find settling time (within 2% of setpoint)
tolerance = 0.02 * setpoints[0]
for i, error in enumerate(errors):
if abs(error) < tolerance and all(abs(e) < tolerance for e in errors[i:]):
settling_time = times[i]
break
print(f"Steady-state error: {steady_state_error:.2f}°C")
print(f"Maximum overshoot: {max_overshoot:.2f}°C")
print(f"Settling time: {settling_time:.0f}s" if settling_time else "System did not settle within simulation time")
# Create comprehensive visualization
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2, figsize=(15, 10))
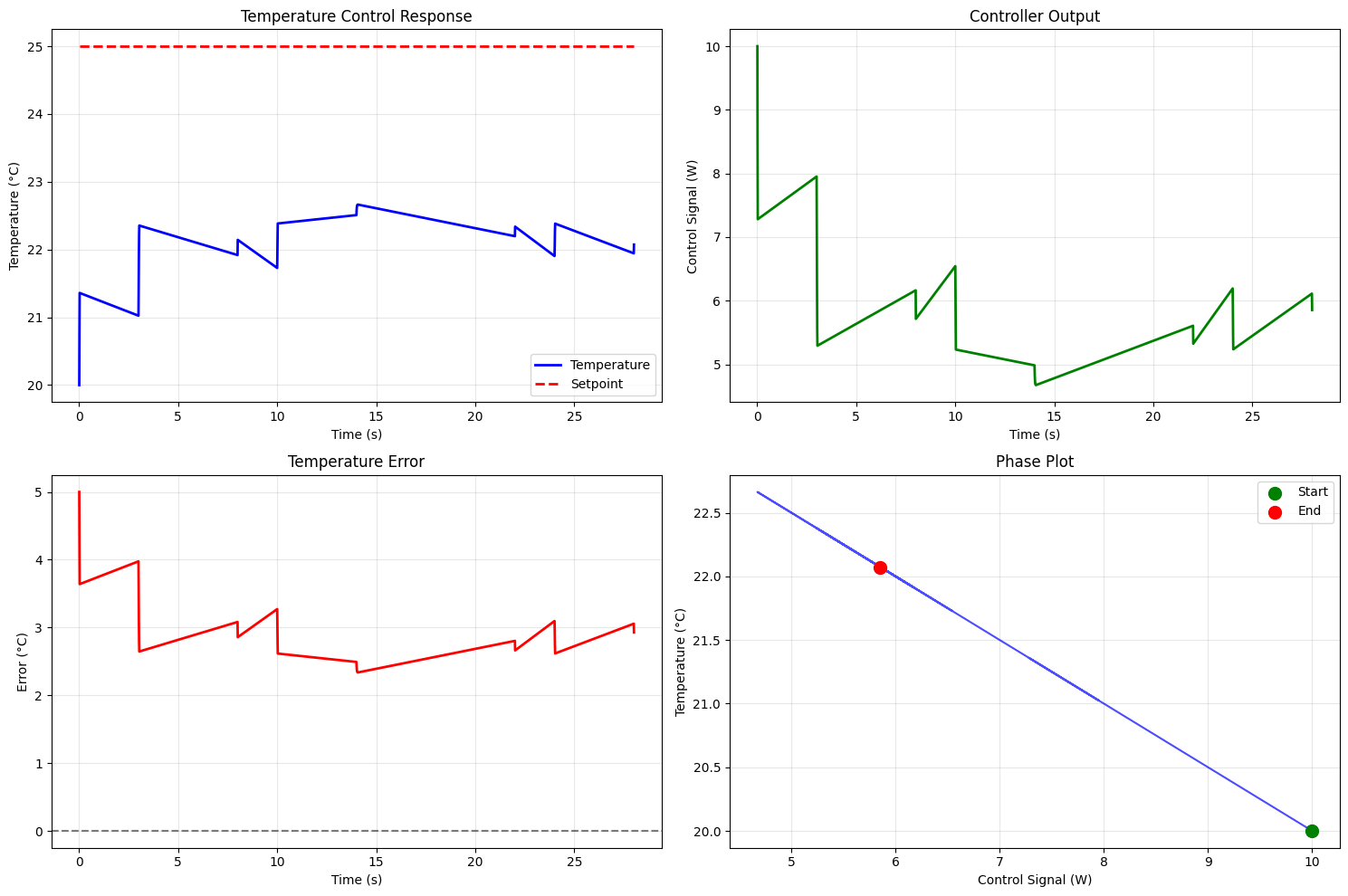
# Temperature vs setpoint
ax1.plot(times, temperatures, 'b-', linewidth=2, label='Temperature')
ax1.plot(times, setpoints, 'r--', linewidth=2, label='Setpoint')
ax1.set_xlabel('Time (s)')
ax1.set_ylabel('Temperature (°C)')
ax1.set_title('Temperature Control Response')
ax1.legend()
ax1.grid(True, alpha=0.3)
# Control signal
ax2.plot(times, control_signals, 'g-', linewidth=2)
ax2.set_xlabel('Time (s)')
ax2.set_ylabel('Control Signal (W)')
ax2.set_title('Controller Output')
ax2.grid(True, alpha=0.3)
# Temperature error
ax3.plot(times, errors, 'r-', linewidth=2)
ax3.axhline(y=0, color='k', linestyle='--', alpha=0.5)
ax3.set_xlabel('Time (s)')
ax3.set_ylabel('Error (°C)')
ax3.set_title('Temperature Error')
ax3.grid(True, alpha=0.3)
# Phase plot (temperature vs control signal)
ax4.plot(control_signals, temperatures, 'b-', alpha=0.7)
ax4.scatter(control_signals[0], temperatures[0], color='green', s=100, label='Start', zorder=5)
ax4.scatter(control_signals[-1], temperatures[-1], color='red', s=100, label='End', zorder=5)
ax4.set_xlabel('Control Signal (W)')
ax4.set_ylabel('Temperature (°C)')
ax4.set_title('Phase Plot')
ax4.legend()
ax4.grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig('temperature_control_results.png', dpi=300, bbox_inches='tight')
plt.show()
print("\n✓ Temperature control analysis complete")
print("Graph saved as 'temperature_control_results.png'")
Temperature Control Results Analysis#
def temperature_plant_federate(results_queue):
"""
HELICS federate implementing thermal plant model
"""
print("[Plant] Starting thermal plant federate...")
# Create plant instance
plant = SimplePlant(initial_temp=20.0, time_constant=10.0, ambient_temp=18.0)
# Create federate
fedinfo = h.helicsCreateFederateInfo()
h.helicsFederateInfoSetCoreName(fedinfo, "ThermalPlant")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
h.helicsFederateInfoSetCoreInitString(fedinfo, "--federates=1")
h.helicsFederateInfoSetTimeProperty(fedinfo, h.helics_property_time_delta, 0.01)
fed = h.helicsCreateValueFederate("ThermalPlant", fedinfo)
print("[Plant] ✓ Federate created")
# Register publication (temperature measurement output)
temp_pub = h.helicsFederateRegisterGlobalPublication(fed, "temperature_measurement", h.HELICS_DATA_TYPE_DOUBLE, "")
# Register subscription (control signal input)
control_sub = h.helicsFederateRegisterSubscription(fed, "control_signal", "")
print("[Plant] ✓ Publications and subscriptions registered")
# Enter execution mode
h.helicsFederateEnterExecutingMode(fed)
print("[Plant] ✓ Entering execution mode")
# Publish initial temperature
h.helicsPublicationPublishDouble(temp_pub, plant.temperature)
# Main simulation loop
simulation_data = []
current_time = 0.0
time_step = 1.0
for step in range(30): # Run for 30 seconds
# Request next time step
next_time = (step + 1) * time_step
current_time = h.helicsFederateRequestTime(fed, next_time)
# Get control signal
control_signal = 0.0 # Default no control
if h.helicsInputIsUpdated(control_sub):
control_signal = h.helicsInputGetDouble(control_sub)
# Update plant dynamics
new_temperature = plant.update_temperature(control_signal, dt=time_step)
# Publish temperature measurement
h.helicsPublicationPublishDouble(temp_pub, new_temperature)
# Log data
simulation_data.append({
'time': current_time,
'temperature': new_temperature,
'control_signal': control_signal
})
print(f"[Plant] Time {current_time:2.0f}s: T={new_temperature:5.1f}°C, U={control_signal:6.1f}W")
# Store results
results_queue.put(('plant', simulation_data))
# Finalize
h.helicsFederateDestroy(fed)
print("[Plant] ✓ Federate finalized")
Running the Temperature Control Co-Simulation#
def run_temperature_control_cosimulation():
"""
Run the complete temperature control co-simulation
"""
print("=== Starting Temperature Control Co-Simulation ===")
# Create broker
broker = h.helicsCreateBroker("zmq", "", "-f 2 --name=tempbroker")
if h.helicsBrokerIsConnected(broker):
print("✓ Broker created and connected")
else:
print("✗ Broker connection failed")
return
# Create results queue
results_queue = Queue()
# Start federates
print("\nStarting federates...")
# Start plant federate first (it publishes initial temperature)
plant_thread = threading.Thread(target=temperature_plant_federate, args=(results_queue,))
plant_thread.start()
time.sleep(0.5) # Brief delay
# Start controller federate
controller_thread = threading.Thread(target=temperature_controller_federate, args=(results_queue,))
controller_thread.start()
# Wait for completion
print("\nWaiting for federates to complete...")
plant_thread.join(timeout=60)
controller_thread.join(timeout=60)
# Clean up
h.helicsBrokerDestroy(broker)
print("\n✓ Broker destroyed")
# Analyze results
analyze_temperature_control_results(results_queue)
print("\n=== Temperature Control Co-Simulation Complete ===")
# Run the temperature control co-simulation
run_temperature_control_cosimulation()
=== Starting Temperature Control Co-Simulation ===
✓ Broker created and connected
Starting federates...
[Plant] Starting thermal plant federate...
[Plant] ✓ Federate created
[Plant] ✓ Publications and subscriptions registered
[Controller] Starting temperature controller federate...
Waiting for federates to complete...
[Controller] ✓ Federate created
[Controller] ✓ Publications and subscriptions registered
[Controller] ✓ Entering execution mode
[Plant] ✓ Entering execution mode
[Controller] Time 0s: T= 20.0°C, SP=25.0°C, U= 10.0W, E= 5.0°C
[Plant] Time 0s: T= 20.8°C, U= 10.0W
[Controller] Time 0s: T= 20.8°C, SP=25.0°C, U= 8.4W, E= 4.2°C
[Plant] Time 0s: T= 21.4°C, U= 8.4W
[Plant] Time 3s: T= 21.0°C, U= 0.0W
[Controller] Time 0s: T= 21.4°C, SP=25.0°C, U= 7.3W, E= 3.6°C
[Plant] Time 3s: T= 21.4°C, U= 7.3W
[Controller] Time 3s: T= 21.0°C, SP=25.0°C, U= 8.0W, E= 4.0°C
[Controller] Time 3s: T= 21.4°C, SP=25.0°C, U= 7.1W, E= 3.6°C
[Plant] Time 3s: T= 21.9°C, U= 8.0W
[Plant] Time 3s: T= 22.2°C, U= 7.1W
[Controller] Time 3s: T= 21.9°C, SP=25.0°C, U= 6.2W, E= 3.1°C
[Controller] Time 3s: T= 22.2°C, SP=25.0°C, U= 5.6W, E= 2.8°C
[Plant] Time 3s: T= 22.4°C, U= 5.6W
[Plant] Time 8s: T= 21.9°C, U= 0.0W
[Controller] Time 3s: T= 22.4°C, SP=25.0°C, U= 5.3W, E= 2.6°C
[Controller] Time 8s: T= 21.9°C, SP=25.0°C, U= 6.2W, E= 3.1°C
[Plant] Time 8s: T= 22.1°C, U= 6.2W
[Plant] Time 10s: T= 21.7°C, U= 0.0W
[Controller] Time 8s: T= 22.1°C, SP=25.0°C, U= 5.7W, E= 2.9°C
[Controller] Time 10s: T= 21.7°C, SP=25.0°C, U= 6.5W, E= 3.3°C
[Plant] Time 10s: T= 21.9°C, U= 5.7W
[Plant] Time 10s: T= 22.2°C, U= 6.5W
[Controller] Time 10s: T= 21.9°C, SP=25.0°C, U= 6.1W, E= 3.1°C
[Controller] Time 10s: T= 22.2°C, SP=25.0°C, U= 5.6W, E= 2.8°C
[Plant] Time 10s: T= 22.4°C, U= 6.1W
[Plant] Time 14s: T= 22.5°C, U= 5.6W
[Controller] Time 10s: T= 22.4°C, SP=25.0°C, U= 5.2W, E= 2.6°C
[Controller] Time 14s: T= 22.5°C, SP=25.0°C, U= 5.0W, E= 2.5°C
[Plant] Time 14s: T= 22.6°C, U= 5.2W
[Plant] Time 14s: T= 22.6°C, U= 5.0W
[Controller] Time 14s: T= 22.6°C, SP=25.0°C, U= 4.8W, E= 2.4°C
[Controller] Time 14s: T= 22.6°C, SP=25.0°C, U= 4.8W, E= 2.4°C
[Plant] Time 14s: T= 22.6°C, U= 4.8W
[Controller] Time 14s: T= 22.6°C, SP=25.0°C, U= 4.7W, E= 2.4°C
[Plant] Time 14s: T= 22.7°C, U= 4.8W
[Plant] Time 14s: T= 22.7°C, U= 4.7W
[Controller] Time 14s: T= 22.7°C, SP=25.0°C, U= 4.7W, E= 2.3°C
[Controller] Time 14s: T= 22.7°C, SP=25.0°C, U= 4.7W, E= 2.3°C
[Plant] Time 14s: T= 22.7°C, U= 4.7W
[Controller] Time 14s: T= 22.7°C, SP=25.0°C, U= 4.7W, E= 2.3°C
[Plant] Time 14s: T= 22.7°C, U= 4.7W
[Plant] Time 22s: T= 22.2°C, U= 0.0W
[Controller] Time 14s: T= 22.7°C, SP=25.0°C, U= 4.7W, E= 2.3°C
[Controller] Time 22s: T= 22.2°C, SP=25.0°C, U= 5.6W, E= 2.8°C
[Plant] Time 22s: T= 22.3°C, U= 5.6W
[Plant] Time 24s: T= 21.9°C, U= 0.0W
[Controller] Time 22s: T= 22.3°C, SP=25.0°C, U= 5.3W, E= 2.7°C
[Controller] Time 24s: T= 21.9°C, SP=25.0°C, U= 6.2W, E= 3.1°C
[Plant] Time 24s: T= 22.0°C, U= 5.3W
[Plant] Time 24s: T= 22.3°C, U= 6.2W
[Controller] Time 24s: T= 22.0°C, SP=25.0°C, U= 5.9W, E= 3.0°C
[Controller] Time 24s: T= 22.3°C, SP=25.0°C, U= 5.5W, E= 2.7°C
[Plant] Time 24s: T= 22.4°C, U= 5.5W
[Plant] Time 28s: T= 21.9°C, U= 0.0W
[Controller] Time 24s: T= 22.4°C, SP=25.0°C, U= 5.2W, E= 2.6°C
[Plant] Time 28s: T= 22.1°C, U= 5.2W
[Controller] Time 28s: T= 21.9°C, SP=25.0°C, U= 6.1W, E= 3.1°C
[Controller] Time 28s: T= 22.1°C, SP=25.0°C, U= 5.9W, E= 2.9°C
[Plant] Time 28s: T= 22.3°C, U= 6.1W
[Controller] ✓ Federate finalized
[2025-07-27 02:20:08.231] [console] [warning] commWarning||tempbroker (1)[operating]::unknown route and no broker, dropping message pub:From (131072) handle(1) size 16 at 28.02 to 131073
[Plant] ✓ Federate finalized
✓ Broker destroyed
=== Temperature Control Analysis ===
Steady-state error: 2.93°C
Maximum overshoot: -2.34°C
System did not settle within simulation time
✓ Temperature control analysis complete
Graph saved as 'temperature_control_results.png'
=== Temperature Control Co-Simulation Complete ===
JSON Configuration Alternative#
While we’ve been configuring federates programmatically, HELICS also supports JSON configuration files for cleaner separation of configuration and implementation logic.
Example JSON Configuration#
Not working
The example is not working and needs fixing.
# Create example JSON configuration files
import json
# Controller configuration
controller_config = {
"name": "TemperatureController",
"core_type": "zmq",
"core_init_string": "--federates=1",
"period": 1.0,
"publications": [
{
"key": "control_signal",
"type": "double",
"global": True,
"info": "Control signal output in watts"
}
],
"subscriptions": [
{
"key": "temperature_measurement",
"type": "double",
"info": "Temperature measurement input in Celsius"
}
]
}
# Plant configuration
plant_config = {
"name": "ThermalPlant",
"autobroker": True,
"coreType": "zmq",
"coreInit": "--federates=1",
"period": 1.0,
"publications": [
{
"key": "temperature_measurement",
"type": "double",
"global": True,
"info": "Temperature measurement output in Celsius"
}
],
"subscriptions": [
{
"key": "control_signal",
"type": "double",
"info": "Control signal input in watts"
}
]
}
# Save configuration files
with open('controller_config.json', 'w') as f:
json.dump(controller_config, f, indent=2)
with open('plant_config.json', 'w') as f:
json.dump(plant_config, f, indent=2)
print("✓ JSON configuration files created")
print(" - controller_config.json")
print(" - plant_config.json")
✓ JSON configuration files created
- controller_config.json
- plant_config.json
Using JSON Configuration#
Here’s how to use JSON configuration instead of programmatic setup:
def create_federate_from_json(config_file):
"""
Demonstrate creating a federate from JSON configuration
"""
print(f"Creating federate from {config_file}...")
try:
# Create federate from JSON config
fed = h.helicsCreateValueFederateFromConfig(config_file)
# Get federate name from configuration
fed_name = h.helicsFederateGetName(fed)
print(f"✓ Federate '{fed_name}' created successfully from JSON")
# Clean up (don't actually run)
h.helicsFederateDestroy(fed)
except Exception as e:
print(f"✗ Failed to create federate from JSON: {e}")
# Demonstrate JSON configuration usage
create_federate_from_json('controller_config.json')
create_federate_from_json('plant_config.json')
Creating federate from controller_config.json...
[2025-07-27 02:20:14.697] [console] [warning] commWarning||TemperatureController_core_6xuD0n (0)[connecting]::zmq broker connection timed out, trying again (2)
[2025-07-27 02:20:14.697] [console] [warning] commWarning||TemperatureController_core_6xuD0n (0)[connecting]::sending message to tcp://127.0.0.1:23405
[2025-07-27 02:20:34.718] [console] [error] commERROR||TemperatureController_core_6xuD0n (0)[connecting]::zmq broker connection timed out after trying 5 times (2)
[2025-07-27 02:20:34.718] [console] [error] commERROR||TemperatureController_core_6xuD0n (0)[connecting]::receiver connection failure
✗ Failed to create federate from JSON: [-1] Unable to connect to broker->unable to register federate
Creating federate from plant_config.json...
✗ Failed to create federate from JSON: [-1] Unable to connect to broker->unable to register federate
Debugging and Troubleshooting#
Common Issues and Solutions#
Understanding how to debug HELICS co-simulations is essential for successful implementation. Due to the distributed nature, debugging co-simulation code is usually more complex than debugging individual scripts.
def helics_diagnostic_check():
"""
Comprehensive diagnostic check for HELICS functionality
"""
print("=== HELICS Diagnostic Check ===")
# Check 1: HELICS import and version
try:
import helics as h
version = h.helicsGetVersion()
print(f"✓ HELICS {version} imported successfully")
except ImportError as e:
print(f"✗ HELICS import failed: {e}")
print(" Solution: Ensure 'cosim' environment is activated and HELICS is installed")
return False
# Check 2: Broker creation and connection
try:
broker = h.helicsCreateBroker("zmq", "", "-f 1 --name=diagnostic")
if h.helicsBrokerIsConnected(broker):
print("✓ Broker creation and connection successful")
h.helicsBrokerDestroy(broker)
else:
print("✗ Broker created but not connected")
print(" Solution: Check network configuration and port availability")
return False
except Exception as e:
print(f"✗ Broker creation failed: {e}")
print(" Solution: Check ZMQ installation and system resources")
return False
# Check 3: Federate creation
try:
fedinfo = h.helicsCreateFederateInfo()
h.helicsFederateInfoSetCoreName(fedinfo, "DiagnosticTest")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
fed = h.helicsCreateValueFederate("DiagnosticTest", fedinfo)
print("✓ Federate creation successful")
h.helicsFederateDestroy(fed)
except Exception as e:
print(f"✗ Federate creation failed: {e}")
print(" Solution: Check federate configuration and broker availability")
return False
# Check 4: Publication/Subscription registration
try:
fedinfo = h.helicsCreateFederateInfo()
fed = h.helicsCreateValueFederate("DiagnosticTest2", fedinfo)
pub = h.helicsFederateRegisterGlobalPublication(fed, "test_pub", h.HELICS_DATA_TYPE_DOUBLE, "")
sub = h.helicsFederateRegisterSubscription(fed, "test_sub", "")
print("✓ Publication/Subscription registration successful")
h.helicsFederateDestroy(fed)
except Exception as e:
print(f"✗ Pub/Sub registration failed: {e}")
print(" Solution: Check publication/subscription names and types")
return False
print("\n✅ All diagnostic checks passed!")
return True
# Run diagnostic check
helics_diagnostic_check()
=== HELICS Diagnostic Check ===
✓ HELICS 3.6.1 (2025-02-24) imported successfully
✓ Broker creation and connection successful
[2025-07-27 02:20:38.861] [console] [warning] commWarning||DiagnosticTest (0)[connecting]::zmq broker connection timed out, trying again (2)
[2025-07-27 02:20:38.861] [console] [warning] commWarning||DiagnosticTest (0)[connecting]::sending message to tcp://127.0.0.1:23405
[2025-07-27 02:20:58.880] [console] [error] commERROR||DiagnosticTest (0)[connecting]::zmq broker connection timed out after trying 5 times (2)
✗ Federate creation failed: [-1] Unable to connect to broker->unable to register federate
Solution: Check federate configuration and broker availability
False
[2025-07-27 02:20:58.880] [console] [error] commERROR||DiagnosticTest (0)[connecting]::receiver connection failure
Common Error Scenarios and Solutions#
1. Broker Connection Failures
Symptoms: Federates hang during creation or entering execution mode
Causes: Network issues, port conflicts, incorrect broker configuration
Solutions: Restart broker, check port availability, verify network settings
2. Time Synchronization Issues
Symptoms: Federates advance at different rates, simulation hangs
Causes: Incorrect time delta settings, missing time requests
Solutions: Verify time request logic, check time delta configuration
3. Publication/Subscription Mismatches
Symptoms: No data exchange, incorrect values received
Causes: Name mismatches, type incompatibilities, timing issues
Solutions: Verify names and types, check update flags
4. Federate Execution Hangs
Symptoms: Federates stop responding, infinite waits
Causes: Missing federates, incorrect execution mode entry
Solutions: Ensure all federates enter execution mode, implement timeouts
Best Practices for HELICS Development#
Start Simple: Begin with minimal examples and add complexity gradually
Use Descriptive Names: Clear publication and subscription names prevent confusion
Implement Timeouts: Prevent infinite hangs with appropriate timeouts
Log Extensively: Use print statements or logging to track federate behavior
Test Incrementally: Verify each component before integration
Handle Errors Gracefully: Implement proper error handling and cleanup
Hands-On Exercise: Data Logger Federate#
Now it’s time to apply what we’ve learned. We’ll extend our temperature control system by adding a third federate that logs data from both the controller and plant.
Exercise Requirements#
Create a Data Logger Federate that:
Subscribes to both temperature measurements and control signals
Logs all data to a CSV file with timestamps
Calculates and displays real-time statistics
Creates a summary report at the end of simulation
Implementation Template#
Complete the missing parts in the template below:
import csv
def data_logger_federate():
"""
HELICS federate that logs data from temperature control system
TODO: Complete this implementation
"""
print("[Logger] Starting data logger federate...")
# TODO 1: Create federate (similar to previous examples)
fedinfo = h.helicsCreateFederateInfo()
# Add your federate configuration here
fed = h.helicsCreateValueFederate("DataLogger", fedinfo)
print("[Logger] ✓ Federate created")
# TODO 2: Register subscriptions for temperature and control signal
temp_sub = None # Subscribe to "temperature_measurement"
control_sub = None # Subscribe to "control_signal"
# TODO 3: Enter execution mode
# Add code here
# TODO 4: Create CSV file for logging
csv_filename = "temperature_control_log.csv"
with open(csv_filename, 'w', newline='') as csvfile:
fieldnames = ['time', 'temperature', 'control_signal']
writer = csv.DictWriter(csvfile, fieldnames=fieldnames)
writer.writeheader()
# TODO 5: Main logging loop (30 time steps)
current_time = 0.0
time_step = 1.0
logged_data = []
for step in range(30):
# TODO: Request next time step
# TODO: Get temperature and control signal values
temperature = 0.0
control_signal = 0.0
# Log data
data_point = {
'time': current_time,
'temperature': temperature,
'control_signal': control_signal
}
writer.writerow(data_point)
logged_data.append(data_point)
print(f"[Logger] Time {current_time:2.0f}s: Logged T={temperature:5.1f}°C, U={control_signal:6.1f}W")
# TODO 6: Generate summary statistics
if logged_data:
temperatures = [d['temperature'] for d in logged_data]
control_signals = [d['control_signal'] for d in logged_data]
print("\n[Logger] === Summary Statistics ===")
print(f"Temperature: min={min(temperatures):.1f}, max={max(temperatures):.1f}, avg={sum(temperatures)/len(temperatures):.1f}°C")
print(f"Control: min={min(control_signals):.1f}, max={max(control_signals):.1f}, avg={sum(control_signals)/len(control_signals):.1f}W")
# TODO 7: Finalize federate
# Add cleanup code here
print(f"[Logger] ✓ Data logged to {csv_filename}")
print("[Logger] ✓ Federate finalized")
print("✓ Data logger template created")
print("Complete the TODO items to implement the data logger federate")
✓ Data logger template created
Complete the TODO items to implement the data logger federate
Exercise Solution#
Here’s the complete implementation of the data logger federate:
def data_logger_federate_solution():
"""
Complete implementation of data logger federate
"""
print("[Logger] Starting data logger federate...")
# Create federate
fedinfo = h.helicsCreateFederateInfo()
h.helicsFederateInfoSetCoreName(fedinfo, "DataLogger")
h.helicsFederateInfoSetCoreTypeFromString(fedinfo, "zmq")
h.helicsFederateInfoSetCoreInitString(fedinfo, "--federates=1")
h.helicsFederateInfoSetTimeProperty(fedinfo, h.helics_property_time_delta, 0.01)
fed = h.helicsCreateValueFederate("DataLogger", fedinfo)
print("[Logger] ✓ Federate created")
# Register subscriptions
temp_sub = h.helicsFederateRegisterSubscription(fed, "temperature_measurement", "")
control_sub = h.helicsFederateRegisterSubscription(fed, "control_signal", "")
print("[Logger] ✓ Subscriptions registered")
# Enter execution mode
h.helicsFederateEnterExecutingMode(fed)
print("[Logger] ✓ Entering execution mode")
# Create CSV file for logging
csv_filename = "temperature_control_log.csv"
with open(csv_filename, 'w', newline='') as csvfile:
fieldnames = ['time', 'temperature', 'control_signal']
writer = csv.DictWriter(csvfile, fieldnames=fieldnames)
writer.writeheader()
# Main logging loop
current_time = 0.0
time_step = 1.0
logged_data = []
for step in range(30):
# Request next time step
next_time = (step + 1) * time_step
current_time = h.helicsFederateRequestTime(fed, next_time)
# Get temperature measurement
temperature = 20.0 # Default value
if h.helicsInputIsUpdated(temp_sub):
temperature = h.helicsInputGetDouble(temp_sub)
# Get control signal
control_signal = 0.0 # Default value
if h.helicsInputIsUpdated(control_sub):
control_signal = h.helicsInputGetDouble(control_sub)
# Log data
data_point = {
'time': current_time,
'temperature': temperature,
'control_signal': control_signal
}
writer.writerow(data_point)
logged_data.append(data_point)
print(f"[Logger] Time {current_time:2.0f}s: Logged T={temperature:5.1f}°C, U={control_signal:6.1f}W")
# Generate summary statistics
if logged_data:
temperatures = [d['temperature'] for d in logged_data]
control_signals = [d['control_signal'] for d in logged_data]
print("\n[Logger] === Summary Statistics ===")
print(f"Temperature: min={min(temperatures):.1f}, max={max(temperatures):.1f}, avg={sum(temperatures)/len(temperatures):.1f}°C")
print(f"Control: min={min(control_signals):.1f}, max={max(control_signals):.1f}, avg={sum(control_signals)/len(control_signals):.1f}W")
# Finalize federate
h.helicsFederateDestroy(fed)
print(f"[Logger] ✓ Data logged to {csv_filename}")
print("[Logger] ✓ Federate finalized")
✓ Data logger solution implemented
This federate can be integrated into the temperature control co-simulation
Summary and Key Takeaways#
What We’ve Learned#
In this lesson, we’ve covered the fundamental concepts and practical implementation of HELICS co-simulation:
Core Concepts:
Brokers coordinate communication between federates
Federates are independent simulation entities
Publication/subscription model enables scalable data exchange
Time management ensures coordinated execution
Implementation Skills:
Creating and configuring HELICS federates
Implementing publication and subscription interfaces
Managing co-simulation execution and time synchronization
Using both programmatic and JSON configuration approaches
Practical Examples:
Pi exchange: Simple unidirectional communication
Temperature control: Bidirectional feedback system
Data logging: Multi-subscription federate design
Debugging Skills:
Common error identification and resolution
Diagnostic procedures for HELICS issues
Best practices for robust co-simulation development
Preparation for Advanced Topics#
The skills developed in this lesson provide the foundation for more advanced applications:
Power System Co-simulation: Using HELICS to coordinate transmission and distribution simulators
Multi-Domain Modeling: Integrating electrical, mechanical, thermal, and communication systems
Large-Scale Simulations: Scaling to hundreds or thousands of federates
Real-Time Applications: Hardware-in-the-loop and real-time co-simulation
Next Steps#
In the next lesson, we will apply these HELICS fundamentals to power system co-simulation, where we’ll:
Connect transmission system simulators (ANDES) with distribution system simulators (OpenDSS)
Exchange power flow data between different voltage levels
Analyze the interactions between transmission and distribution operations
Understand the practical challenges of multi-domain power system simulation
Self-Assessment#
Before proceeding to the next lesson, ensure that:
All code examples in this notebook execute successfully
The diagnostic check passes without errors
The temperature control co-simulation produces reasonable results
The data logger exercise is completed successfully
Key HELICS concepts are clearly understood
If any of these items are incomplete, review the relevant sections and seek assistance as needed.
References and Additional Resources#
HELICS Documentation#
Official Documentation: https://docs.helics.org/
Python API Reference: https://python.helics.org/
Tutorial Repository: GMLC-TDC/HELICS-Tutorial
Academic Papers#
Hardy, T. D., et al. “HELICS: A co-simulation framework for scalable multi-domain modeling and analysis.” IEEE Access 12 (2024): 24325-24347.
Top, P., et al. “The HELICS co-simulation framework.” 2017 Workshop on Modeling and Simulation of Cyber-Physical Energy Systems (MSCPES). IEEE, 2017.
Community Resources#
HELICS Gitter Chat: https://gitter.im/GMLC-TDC/HELICS
GitHub Issues: GMLC-TDC/HELICS#issues
User Forum: GMLC-TDC/HELICS#discussions